A Mars Rover Analysis
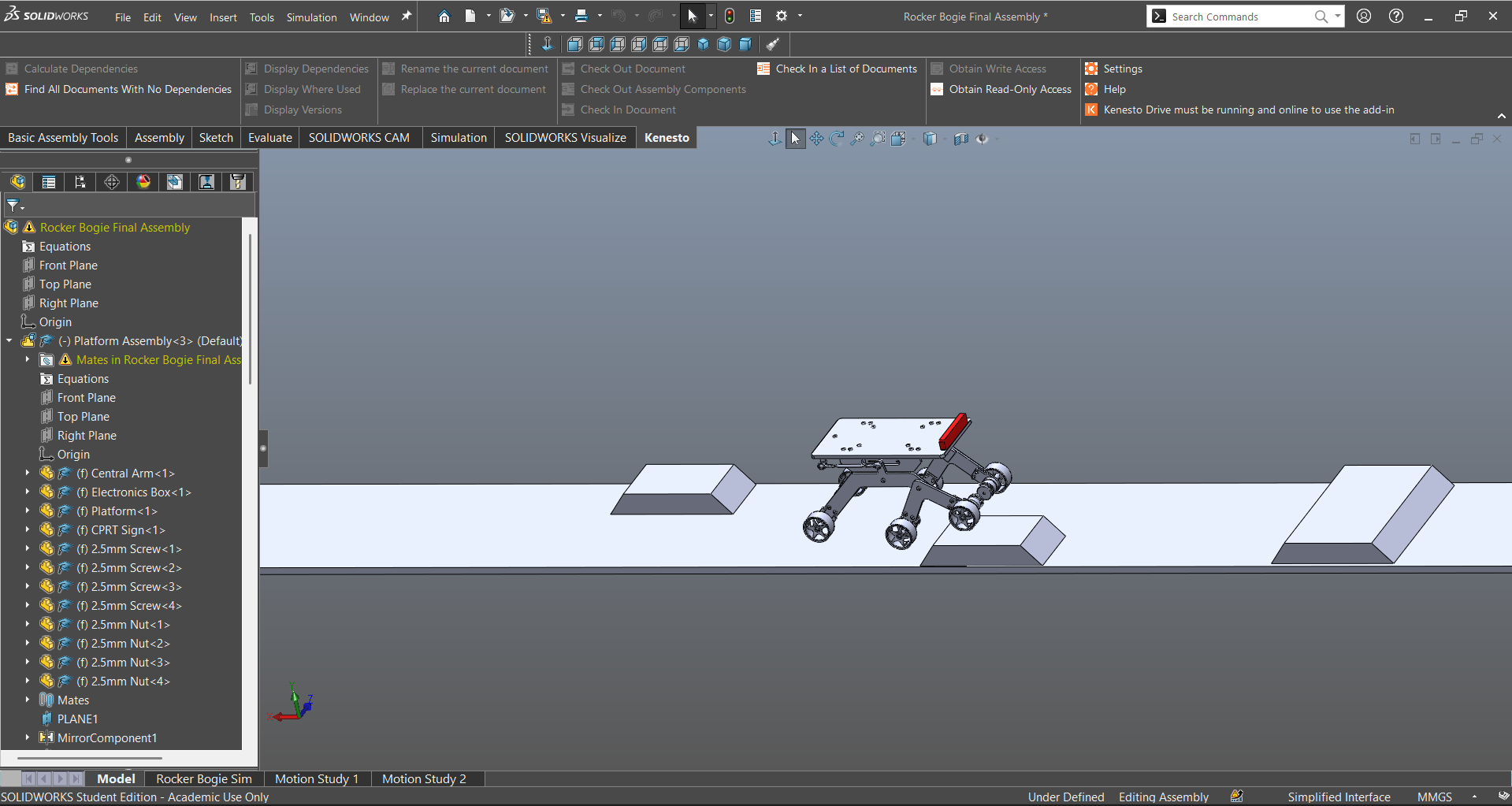
The goal was to model, simulate, and verify how a rocker-bogie architecture maintains wheel contact and stability under realistic surface conditions.
Studying the suspension system in unever terrains for future improvements to our 2026 rover.
What I did:
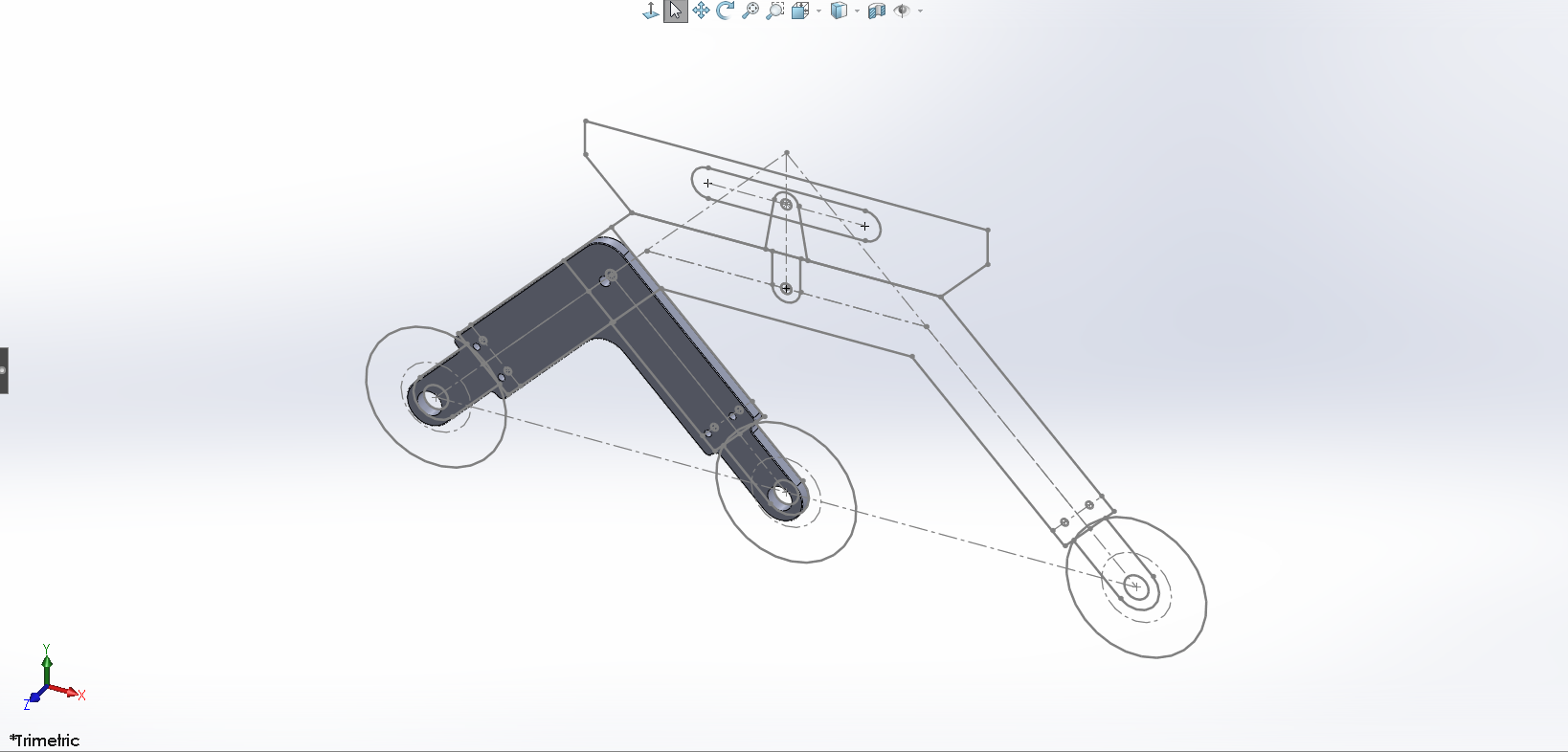
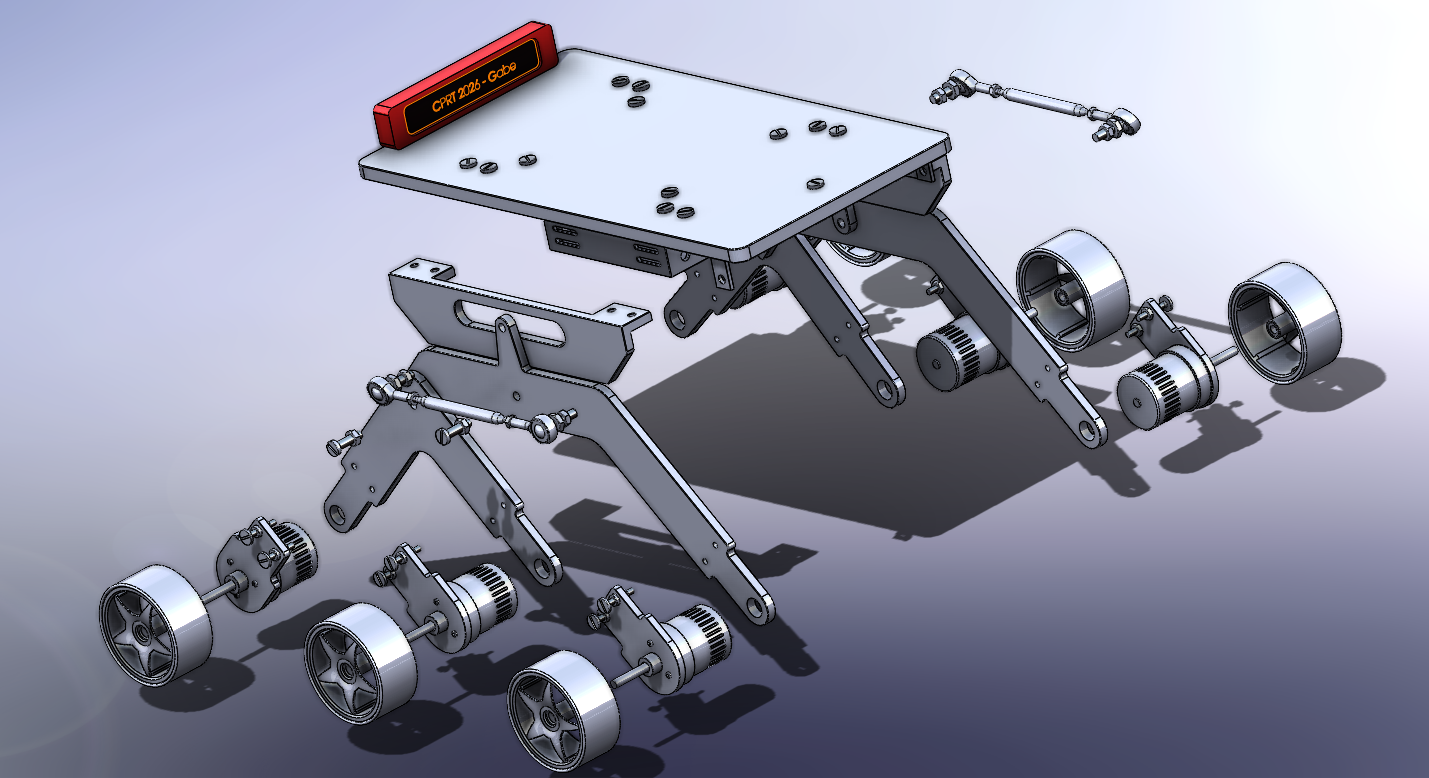
- Modeled individual subsystems including rockers, bogies, tie rods, motor mounts, a platform, and an electrical box
- Created proper mates of the transfer bar and tie rods, allowing for properly restricted motions
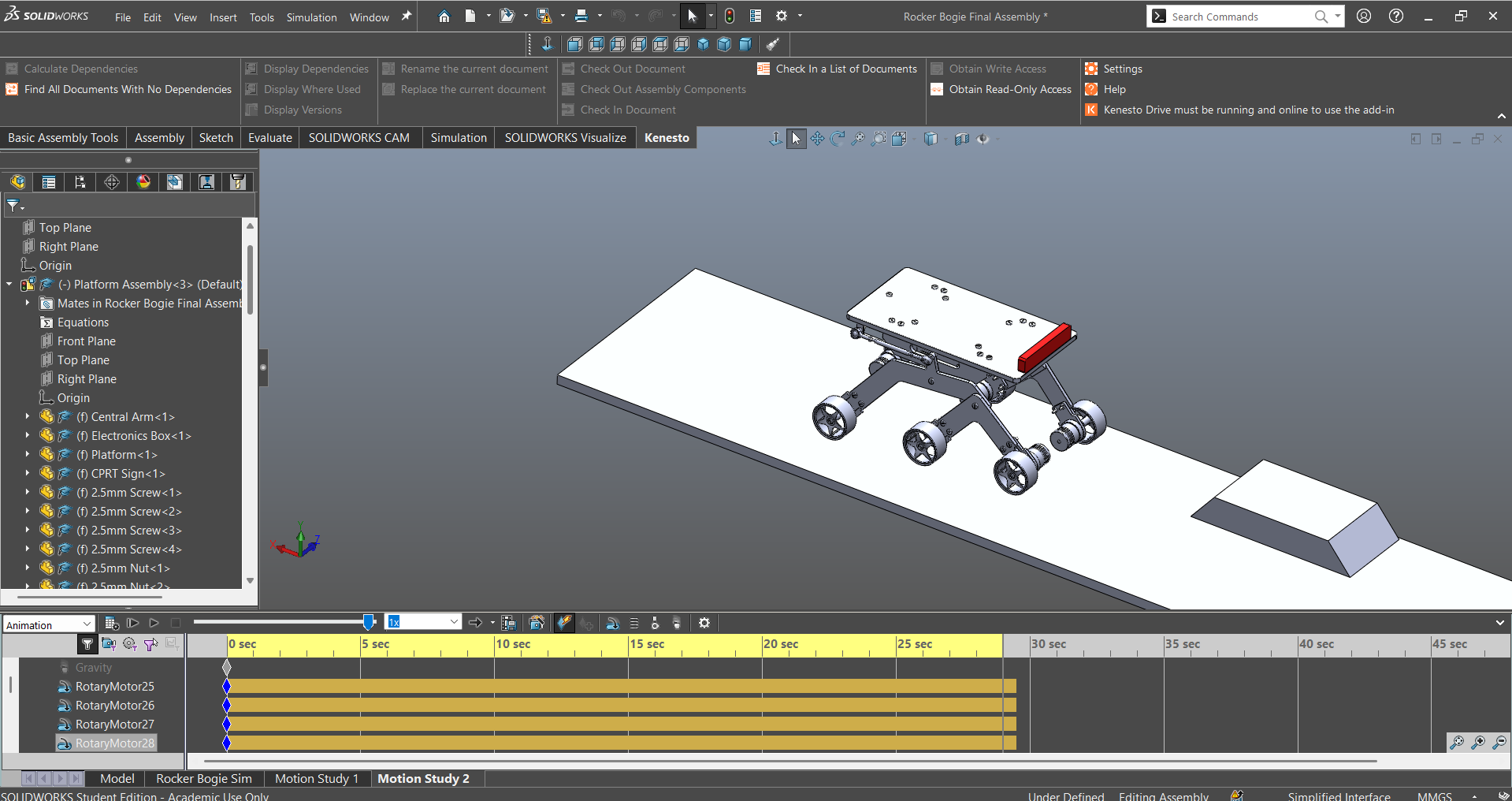
- Ran a SolidWorks motion study setting motors, terrain conditions, contact points and aiming for real situations
At the end of this, I learned a ton about SolidWorks and what is needed to create one whole functional system!