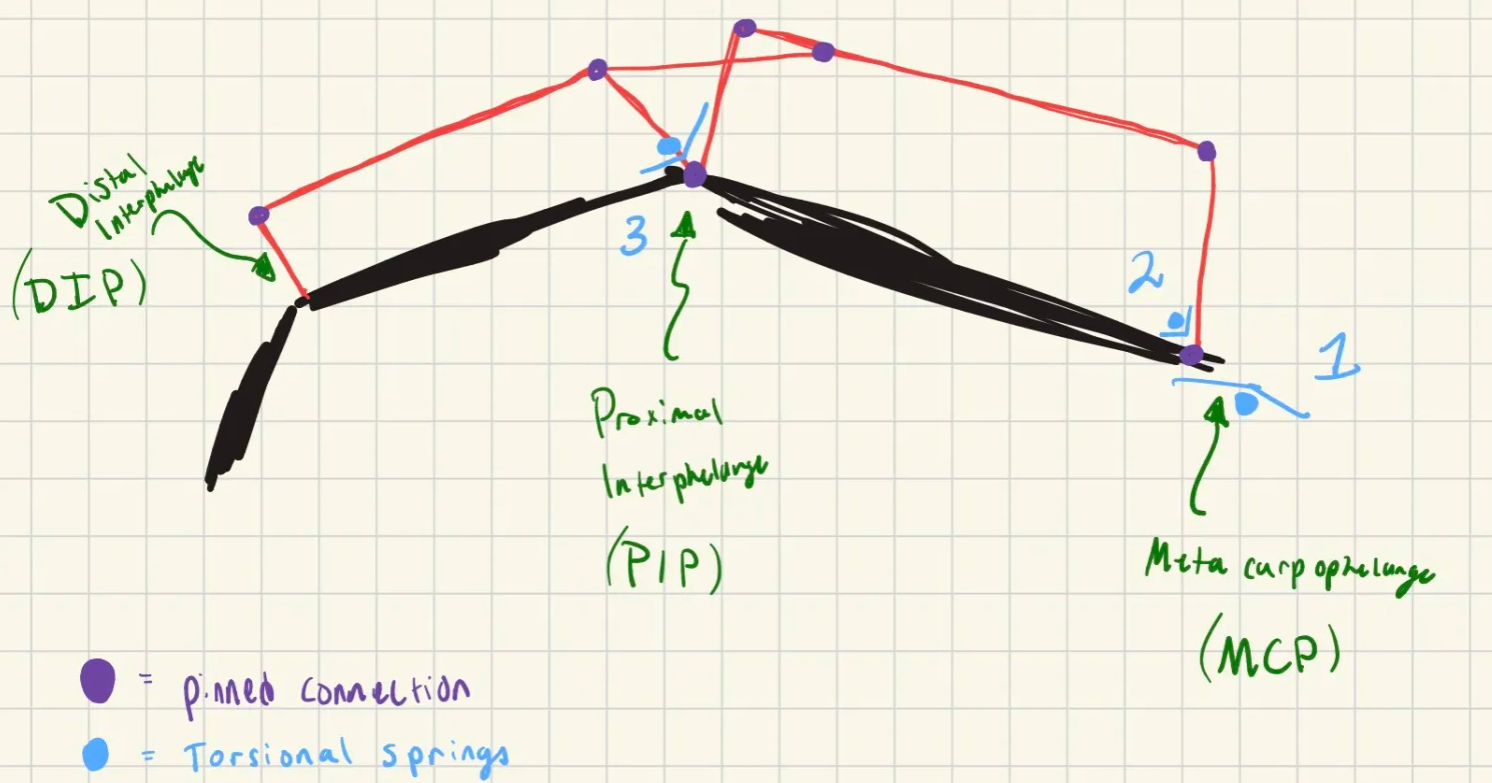
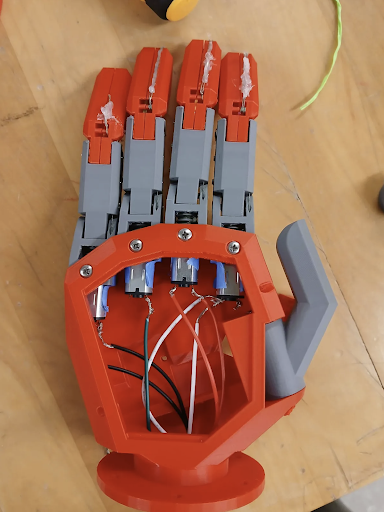
Design fingers for a full biomechanical arm that is intended for activities of daily living.
Joints must be independent from one another, allowing for the mechanism to decide the motion, not the controller.
Aiming to improve from our current design.
This will be done by using an underactuated linkage with torsional springs.